Blog

Hybrid manufacturing opens the pathway for in-situ repair of high-value industrial components for industries, such as aerospace, oil and gas, etc. A portable robotic cell for repair enables the solution to move to the problem, allowing supply management practices such as just-in-time manufacturing, shortening the supply chain and dramatically increasing the sustainability of the repair operation for large-scale industrial components, by significantly reducing the required transports. To this end, HybridR is developing such a cell with a specific focus on repair of high-value components, apart from green field manufacturing.
In cases of portable manufacturing cells for hybrid manufacturing development, the design of the load bearing structure of the cell becomes significantly complicated, since it needs to provide the required stiffness to support the machining loads, while minimizing the weight to enhance portability. The final accuracy of the machining system depends on the behavior of the frame structure which is loaded under static, dynamic, and thermal loads.
To support this design optimization effort within the HybridR project, the Digital Twin of the robotic machining process has been exploited, taking into account both the process and the robotic arm to set the boundary conditions for the design of the load bearing structure. The use of the digital twin to build the boundary conditions for the simulation of the robotic cell can effectively lead to a virtual prototype of the whole system that can reduce the need for physical prototyping and trial and error approaches.
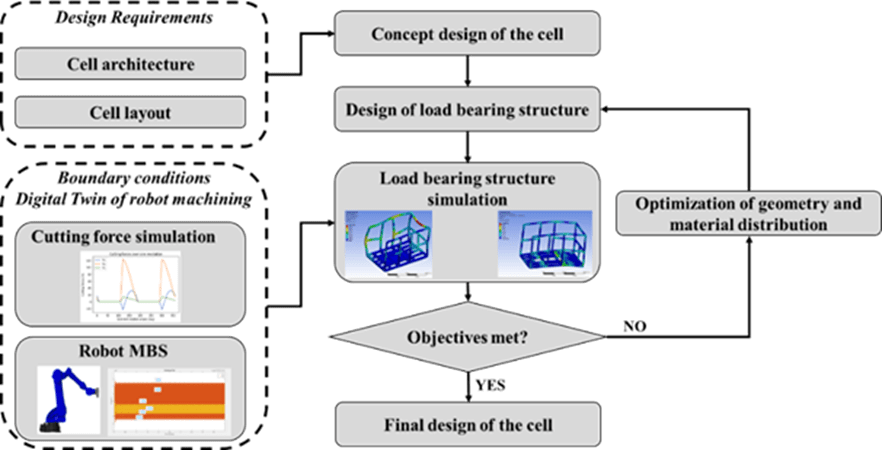 Figure 1: Overview of the used design approach
Figure 1: Overview of the used design approach
Three different simulations have been performed during the design stage of the load bearing structure, in order to create a successful design that will ensure a safe and reliable operation and transportation:
- Simulation of the material removal process by using the Multi-Body Simulation for the robotic arm, considering both the flexibility from its joints and links.
- A static structural simulation was performed to estimate the stresses and deformations on the load bearing structure during transportation scenarios.
- A harmonic response analysis using as input the forces that was calculated from the machining process simulation.
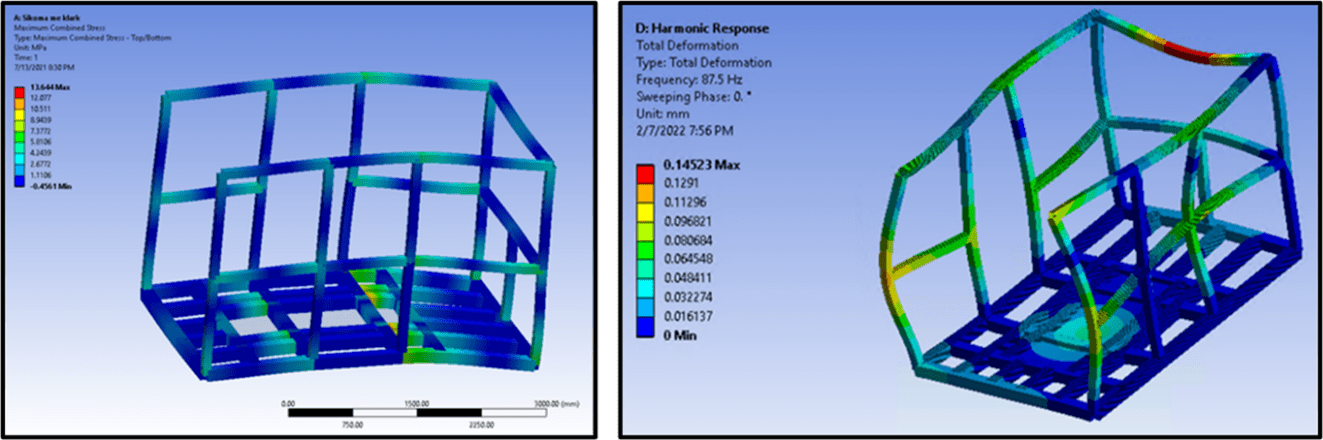 Figure 2: Static and harmonic response analysis simulation results (ANSYS)
Figure 2: Static and harmonic response analysis simulation results (ANSYS)
Through the knowledge of the dynamic behavior of the portable hybrid manufacturing cell, gained by these simulations, it was possible to design a lightweight, yet highly stiff, load bearing structure to support the machining loads and ensure high accuracy of the milling process.
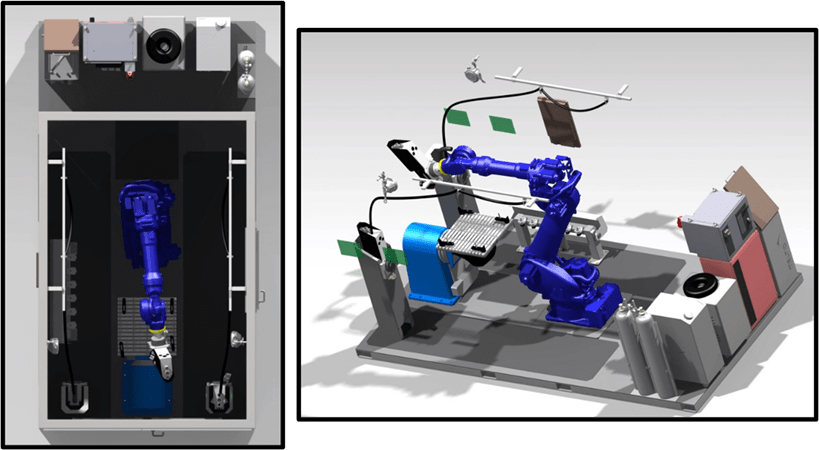 Figure 3: Complete cell render
Figure 3: Complete cell render